

智能張拉
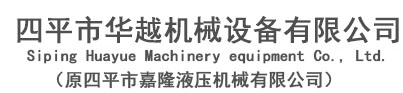
兩頂智能張拉系統

兩頂智能張拉系統
產(chǎn)品描述
技術(shù)參數
選型表
預應力智能張拉控制系統用于橋梁預應力張拉的自動(dòng)控制,采用觸摸屏和高性能邏輯控制器,通過(guò)超高壓電磁閥控制2缸同步張拉。系統操作簡(jiǎn)單,一鍵操作即可完成整個(gè)張拉過(guò)程,控制精度高,可有效提高預應力施工質(zhì)量。
主要特點(diǎn):
1.一鍵張拉
一鍵操作可實(shí)現初張拉、二倍初張、終張拉、錨固、退缸整個(gè)過(guò)程。
2.力與伸長(cháng)量雙控
以目標張拉力為主,并以預應力筋伸長(cháng)量作為校核,實(shí)現雙控。
3.準確張拉
張拉力控制精度<1%,位移測量精度<0.25%,壓力測量精度<0.5%。
4.多種張拉模式
可以實(shí)現單束單端、單束雙端、超張等多種張拉模式;
可支持T梁、箱梁、現澆梁、先張梁等多種梁型的張拉施工。
5.數據導出功能
張拉數據可通過(guò)U盤(pán)導出,并可在管理微機上查詢(xún)、報表打印。
6.數據存儲功能
系統自動(dòng)存儲張拉過(guò)程中的位移、壓力、控制應力、理論伸長(cháng)量、伸長(cháng)量誤差等數據,便于查詢(xún)分析。
7.斷電恢復功能
張拉過(guò)程中斷電,自動(dòng)記錄當前工作狀態(tài),再次上電,可繼續張拉,保持數據完整。
8.支持遠程監控
通過(guò)遠程監控系統,對現場(chǎng)數據進(jìn)行實(shí)時(shí)監測和急??刂?,并以曲線(xiàn)圖形式顯示,形象直觀(guān),一目了然。
9.采用工業(yè)觸摸屏
工業(yè)觸摸屏相對于使用微機,可靠性、抗震性、環(huán)境耐受性更好。
10.邏輯控制器專(zhuān)業(yè)設計
核心部件采用專(zhuān)為智能張拉機設計的邏輯控制器。該控制器集成了多路AD/DA、多路開(kāi)關(guān)量輸入/輸出、四路串口、通訊網(wǎng)口等,工作可靠、電路簡(jiǎn)潔、維護方便 。
11.采用藍牙通訊
主從機無(wú)線(xiàn)通訊采用藍牙模塊,藍牙通訊采用跳頻通信模式,相對于傳統的無(wú)線(xiàn)路由WIFY通信模式,可靠性更高,通信距離更遠
12.采用雙極無(wú)彈簧超高壓泵
雙極無(wú)彈簧超高壓泵,利用油壓復位充油,避免了彈簧失效而無(wú)法復位;低溫吸油性好,高壓高溫泵油量穩定,工作可靠。
13.采用德國位移傳感器
德國磁致伸縮位移傳感器采用非接觸測量模式,準確度可達0.1mm,相對于接觸式的電子尺(滑線(xiàn)電位器)壽命更長(cháng),精度更高。
14.采用超高壓液壓閥組
采用70MPa超高壓液壓閥組,閥套、閥芯均采用合金鋼,相對于傳統的閥強度更高、配合間隔更小,內泄更少。
15.采用數顯壓力傳感器
數顯壓力傳感器相對于傳統的機械指針壓力傳感器精度更高、讀數更直觀(guān),避免人為視覺(jué)誤差。
四頂智能張拉系統

技術(shù)參數
選型表
預應力智能張拉控制系統用于橋梁預應力張拉的自動(dòng)控制,采用觸摸屏和高性能邏輯控制器,通過(guò)超高壓電磁閥控制2缸或4缸同步張拉。系統操作簡(jiǎn)單,一鍵操作即可完成整個(gè)張拉過(guò)程,控制精度高,可有效提高預應力施工質(zhì)量。
主要特點(diǎn):
1.一機雙頂
主機或從機各控制兩個(gè)頂,相比4個(gè)機器控制個(gè)4頂的張拉系統,使用更方便。
2.一鍵張拉
一鍵操作可實(shí)現初張拉、二倍初張、終張拉、錨固、退缸整個(gè)過(guò)程。
3.力與伸長(cháng)量雙控
以目標張拉力為主,并以預應力筋伸長(cháng)量作為校核,實(shí)現雙控。
4.張拉
張拉力控制精度<1%,位移測量精度<0.25%,壓力測量精度<0.5%。
5.多種張拉模式
可以實(shí)現單束單端、單束雙端、雙束單端、雙束雙端、超張等多種張拉模式;
可支持T梁、箱梁、現澆梁、先張梁等多種梁型的張拉施工。
6.數據導出功能
張拉數據可通過(guò)U盤(pán)導出,并可在管理微機上查詢(xún)、報表打印。
7.數據存儲功能
系統自動(dòng)存儲張拉過(guò)程中的位移、壓力、控制應力、理論伸長(cháng)量、伸長(cháng)量誤差等數據,便于查詢(xún)分析。
8.斷電恢復功能
張拉過(guò)程中斷電,自動(dòng)記錄當前工作狀態(tài),再次上電,可繼續張拉,保持數據完整。
9.支持遠程監控
通過(guò)遠程監控系統,對現場(chǎng)數據進(jìn)行實(shí)時(shí)監測和急??刂?,并以曲線(xiàn)圖形式顯示,形象直觀(guān),一目了然。
10.采用工業(yè)觸摸屏
工業(yè)觸摸屏相對于使用微機,可靠性、抗震性、環(huán)境耐受性更好。
11.邏輯控制器專(zhuān)業(yè)設計
核心部件采用專(zhuān)為智能張拉機設計的邏輯控制器。該控制器集成了多路AD/DA、多路開(kāi)關(guān)量輸入/輸出、四路串口、通訊網(wǎng)口等,工作可靠、電路簡(jiǎn)潔、維護方便 。
12.采用藍牙通訊
主從機無(wú)線(xiàn)通訊采用藍牙模塊,藍牙通訊采用跳頻通信模式,相對于傳統的無(wú)線(xiàn)路由WIFY通信模式,可靠性更高,通信距離更遠
13.采用雙極無(wú)彈簧超高壓泵
雙極無(wú)彈簧超高壓泵,利用油壓復位充油,避免了彈簧失效而無(wú)法復位;低溫吸油性好,高壓高溫泵油量穩定,工作可靠。
14.采用德國位移傳感器
德國磁致伸縮位移傳感器采用非接觸測量模式,準確度可達0.1mm,相對于接觸式的電子尺(滑線(xiàn)電位器)壽命更長(cháng),精度更高。
15.采用超高壓液壓閥組
采用70MPa超高壓液壓閥組,閥套、閥芯均采用合金鋼,相對于傳統的閥強度更高、配合間隔更小,內泄更少。
16.采用數顯壓力傳感器
數顯壓力傳感器相對于傳統的機械指針壓力傳感器精度更高、讀數更直觀(guān),避免人為視覺(jué)誤差。